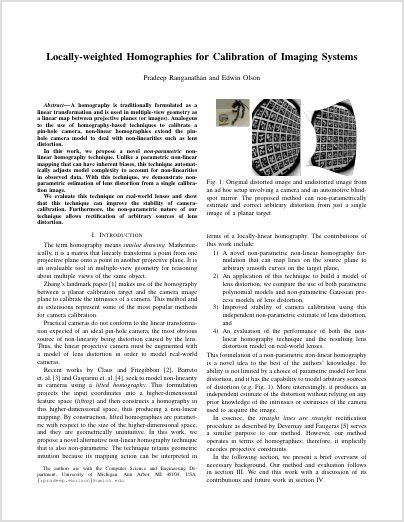
A homography is traditionally formulated as a linear transformation and is used in multiple-view geometry as a linear map between projective planes (or images). Analogous to the use of homography-based techniques to calibrate a pin-hole camera, non-linear homographies extend the pin-hole camera model to deal with non-linearities such as lens distortion. In this work, we propose a novel non-parametric non-linear homography technique. Unlike a parametric non-linear mapping that can have inherent biases, this technique automatically adjusts model complexity to account for non-linearities in observed data. With this technique, we demonstrate non-parametric estimation of lens distortion from a single calibration image. We evaluate this technique on real-world lenses and show that this technique can improve the stability of camera-calibration. Furthermore, the non-parametric nature of our technique allows rectification of arbitrary sources of lens distortion.
@inproceedings{ranganathan2014iros,
TITLE = {Locally-weighted Homographies for Calibration of Imaging Systems},
AUTHOR = {Pradeep Ranganathan and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE/RSJ} International Conference on Intelligent
Robots and Systems {(IROS)}},
YEAR = {2014},
MONTH = {October},
KEYWORDS = {Calibration and Identification, Computer Vision},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.