Mechanical

Our plan is to purchase off-the-shelf golf carts; these vehicles need to be modified to support drive-by-wire control. This will require interfacing with some of the vehicle's electronics (for throttle and brake) and mounting a motor to the steering column. Members of this team will also perform physical modifications to the vehicle to mount sensors, computers, antennas, etc.
Sensing, Localization, and Control

A fully-autonomous vehicle is very complicated; our plan is to keep things simple. We will begin by using a combination of dead-reckoning (using inertial measurement units, odometry, and GPS) along with following a colored line on the ground. The vehicle must then follow this line.
Mobile Application
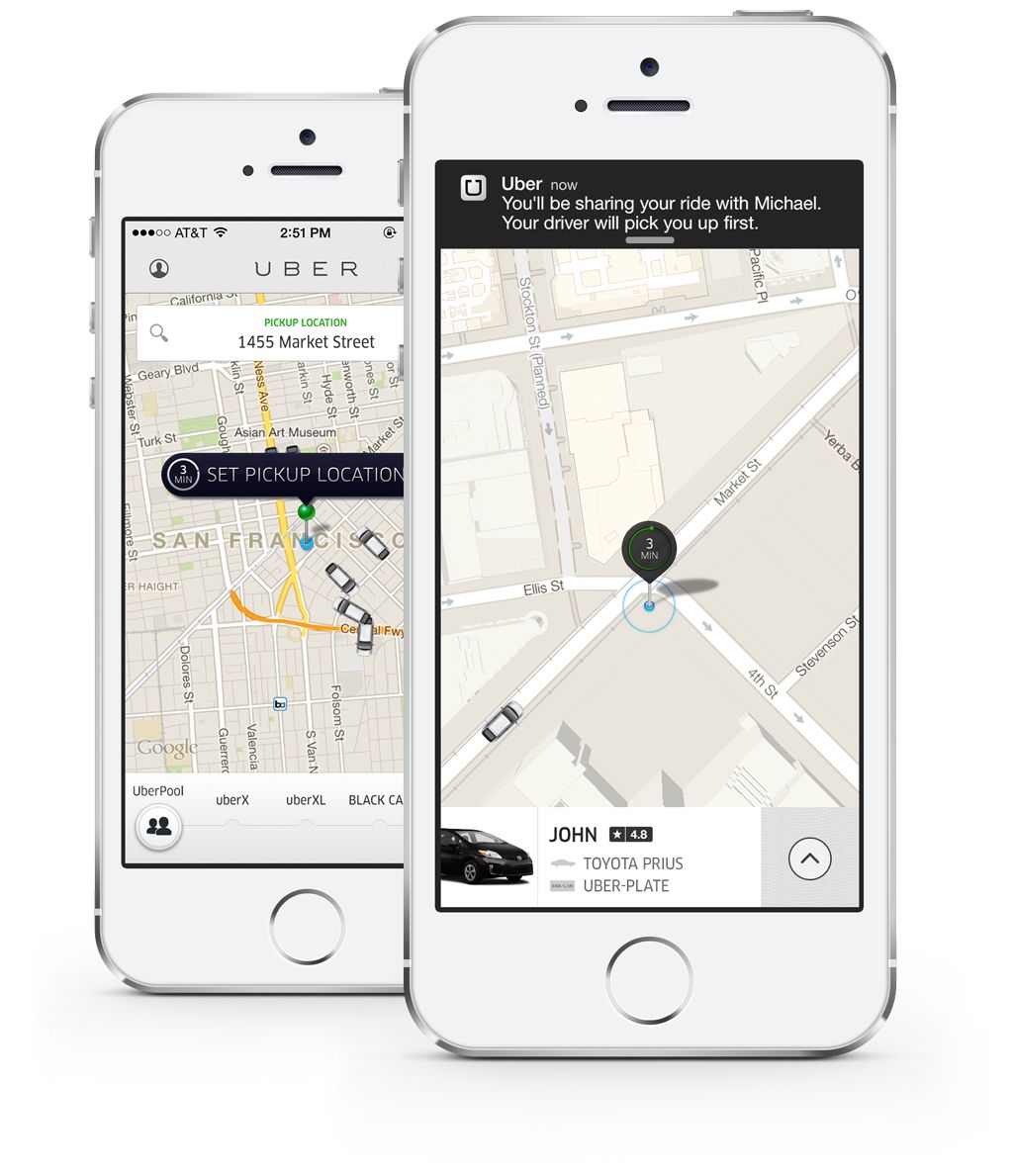
Our system is useless unless users can summon a vehicle. The mobile applications team will develop an HTML5 application that allows users to request a vehicle. Think Uber app, but with autonomous cars.
Operations and Optimization
An important part of this system is scheduling vehicles across the various requests made by users. This is an interesting (and difficult) optimization problem, since we can arrange for rendezvous with users at their door (when demand is low) or at a convenient intersection (when demand is high).
Faculty
Edwin Olson

Edwin Olson is an Associate Professor in Computer Science and Engineering and heads the APRIL Robotics Laboratory. His research centers around multi-robot coordination, mapping, and autonomous vehicles.
Ryan Eustice

Ryan Eustice is an Associate Professor in Naval Architecture and Marine Engineering and heads the PeRL Laboratory. He is an expert in underwater robots, autonomous vehicles, and robot perception.