
 Non-parametric Models for Long-term Autonomy
Non-parametric Models for Long-term Autonomy Monte-Carlo Policy-Tree Decision Making
Monte-Carlo Policy-Tree Decision Making Decentralized Multi-Policy Decision Making for Communication Constrained Multi-Robot Coordination (Preprint)
Decentralized Multi-Policy Decision Making for Communication Constrained Multi-Robot Coordination (Preprint) Evolving Policy Sets for Multi-Policy Decision Making (Preprint)
Evolving Policy Sets for Multi-Policy Decision Making (Preprint) AXLE: Computationally-efficient trajectory smoothing using factor graph chains
AXLE: Computationally-efficient trajectory smoothing using factor graph chains The Masked Mapper: Masked Metric Mapping
The Masked Mapper: Masked Metric Mapping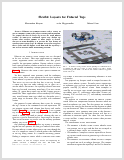 Flexible Layouts for Fiducial Tags
Flexible Layouts for Fiducial Tags Probabilistic Multi-Robot Search for an Adversarial Target
Probabilistic Multi-Robot Search for an Adversarial Target Adaptive Communication for Mobile Multi-Robot Systems
Adaptive Communication for Mobile Multi-Robot Systems High Availability Mapping and Localization
High Availability Mapping and Localization Non-parametric Error Modeling for Ultra-wideband Localization Networks
Non-parametric Error Modeling for Ultra-wideband Localization Networks Optimizing Multi-Robot Communication under Bandwidth Constraints
Optimizing Multi-Robot Communication under Bandwidth Constraints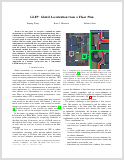 GLFP: Global Localization from a Floor Plan
GLFP: Global Localization from a Floor Plan MPDM: Multi-policy Decision-Making from Autonomous Driving to Social Robot Navigation
MPDM: Multi-policy Decision-Making from Autonomous Driving to Social Robot Navigation Multi-Policy Decision Making for Reliable Navigation in Dynamic Uncertain Environments
Multi-Policy Decision Making for Reliable Navigation in Dynamic Uncertain Environments AprilSAM: Real-time Smoothing and Mapping
AprilSAM: Real-time Smoothing and Mapping Backprop-MPDM: Faster risk-aware policy evaluation through efficient gradient optimization
Backprop-MPDM: Faster risk-aware policy evaluation through efficient gradient optimization HoverBots: Embracing and Detecting Collisions Using Robots Designed for Manufacturability
HoverBots: Embracing and Detecting Collisions Using Robots Designed for Manufacturability Multi-Functional Sensing for Swarm Robots Using Time Sequence Classification: HoverBot, an Example
Multi-Functional Sensing for Swarm Robots Using Time Sequence Classification: HoverBot, an Example Policy-Based Planning for Robust Robot Navigation
Policy-Based Planning for Robust Robot Navigation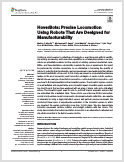 HoverBots: Precise Locomotion Using Robots That Are Designed for Manufacturability
HoverBots: Precise Locomotion Using Robots That Are Designed for Manufacturability Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: Theory and experiment
Multipolicy decision-making for autonomous driving via changepoint-based behavior prediction: Theory and experiment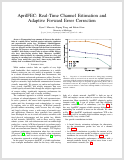 AprilFEC: Real-Time Channel Estimation and Adaptive Forward Error Correction
AprilFEC: Real-Time Channel Estimation and Adaptive Forward Error Correction Fast discovery of influential outcomes for risk-aware MPDM
Fast discovery of influential outcomes for risk-aware MPDM FLAG: Feature-based Localization between Air and Ground
FLAG: Feature-based Localization between Air and Ground FLAT2D: Fast Localization from Approximate Transformation into 2D
FLAT2D: Fast Localization from Approximate Transformation into 2D Autonomous Navigation in Dynamic Social Environments using Multi-Policy Decision Making
Autonomous Navigation in Dynamic Social Environments using Multi-Policy Decision Making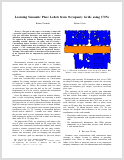 Learning Semantic Place Labels from Occupancy Grids using CNNs
Learning Semantic Place Labels from Occupancy Grids using CNNs AprilTag 2: Efficient and robust fiducial detection
AprilTag 2: Efficient and robust fiducial detection Adaptive forward error correction with adjustable-latency QoS for robotic networks
Adaptive forward error correction with adjustable-latency QoS for robotic networks Preliminary Observations from Robot-Enabled Surface Methane Concentration Monitoring at a MSW Landfill
Preliminary Observations from Robot-Enabled Surface Methane Concentration Monitoring at a MSW Landfill Non-parametric Models of Distortion in Imaging Systems
Non-parametric Models of Distortion in Imaging Systems The Federal Railroad Administration's Automated Grade Crossing Survey System
The Federal Railroad Administration's Automated Grade Crossing Survey System Maximum Likelihood Tracking of a Personal Dead-Reckoning System
Maximum Likelihood Tracking of a Personal Dead-Reckoning System TailoredBRIEF: Online Per-Feature Descriptor Customization
TailoredBRIEF: Online Per-Feature Descriptor Customization Augmented vehicle tracking under occlusions for decision-making in autonomous driving
Augmented vehicle tracking under occlusions for decision-making in autonomous driving  High-Performance Inertial Measurements Using a Redundant Array of Inexpensive Gyroscopes (RAIG)
High-Performance Inertial Measurements Using a Redundant Array of Inexpensive Gyroscopes (RAIG) Multipolicy Decision-Making for Autonomous Driving via Changepoint-based Behavior Prediction
Multipolicy Decision-Making for Autonomous Driving via Changepoint-based Behavior Prediction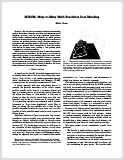 M3RSM: Many-to-Many Multi-Resolution Scan Matching
M3RSM: Many-to-Many Multi-Resolution Scan Matching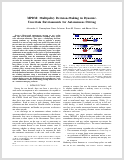 MPDM: Multipolicy Decision-Making in Dynamic, Uncertain Environments for Autonomous Driving
MPDM: Multipolicy Decision-Making in Dynamic, Uncertain Environments for Autonomous Driving Toward integrated motion planning and control using potential fields and torque-based steering actuation for autonomous driving
Toward integrated motion planning and control using potential fields and torque-based steering actuation for autonomous driving  FILTERING AND TRACKING FOR A PEDESTRIAN DEAD-RECKONING SYSTEM
FILTERING AND TRACKING FOR A PEDESTRIAN DEAD-RECKONING SYSTEM Online mapping and perception algorithms for multi-robot teams operating in urban environments
Online mapping and perception algorithms for multi-robot teams operating in urban environments Learning and Searching Methods for Robust, Real-Time Visual Odometry
Learning and Searching Methods for Robust, Real-Time Visual Odometry Locally-weighted Homographies for Calibration of Imaging Systems
Locally-weighted Homographies for Calibration of Imaging Systems PAS: Visual Odometry with Perspective Alignment Search
PAS: Visual Odometry with Perspective Alignment Search Robust Pose Graph Optimization Using Stochastic Gradient Descent
Robust Pose Graph Optimization Using Stochastic Gradient Descent AprilCal: Assisted and repeatable camera calibration
AprilCal: Assisted and repeatable camera calibration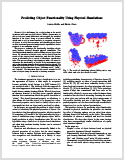 Predicting Object Functionality Using Physical Simulations
Predicting Object Functionality Using Physical Simulations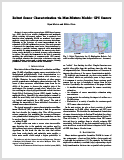 Robust Sensor Characterization via Max-Mixture Models: GPS Sensors
Robust Sensor Characterization via Max-Mixture Models: GPS Sensors Inferring Categories to Accelerate the Learning of New Classes
Inferring Categories to Accelerate the Learning of New Classes Inference on networks of mixtures for robust robot mapping
Inference on networks of mixtures for robust robot mapping Learning Convolutional Filters for Interest Point Detection
Learning Convolutional Filters for Interest Point Detection Exploration and Mapping with Autonomous Robot Teams
Exploration and Mapping with Autonomous Robot Teams Multi-sensor ATTenuation Estimation (MATTE): Signal-strength prediction for teams of robots
Multi-sensor ATTenuation Estimation (MATTE): Signal-strength prediction for teams of robots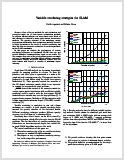 Variable reordering strategies for SLAM
Variable reordering strategies for SLAM DART: A Particle-based Method for Generating Easy-to-Follow Directions
DART: A Particle-based Method for Generating Easy-to-Follow Directions IPJC: The Incremental Posterior Joint Compatibility Test for Fast Feature Cloud Matching
IPJC: The Incremental Posterior Joint Compatibility Test for Fast Feature Cloud Matching Gaussian Process for Lens Distortion Modeling
Gaussian Process for Lens Distortion Modeling Progress towards multi-robot reconnaissance and the MAGIC 2010 Competition
Progress towards multi-robot reconnaissance and the MAGIC 2010 Competition Inference on networks of mixtures for robust robot mapping
Inference on networks of mixtures for robust robot mapping A Hands-Off, Multi-Robot Display for Communicating Situation Awareness to Operators
A Hands-Off, Multi-Robot Display for Communicating Situation Awareness to Operators Robot Localization Using Overhead Camera and LEDs
Robot Localization Using Overhead Camera and LEDs Iterative Path Optimization for Practical Robot Planning
Iterative Path Optimization for Practical Robot Planning Occupancy Grid Rasterization in Large Environments for Teams of Robots
Occupancy Grid Rasterization in Large Environments for Teams of Robots Positive and Negative Obstacle Detection using the HLD Classifier
Positive and Negative Obstacle Detection using the HLD Classifier AprilTag: A robust and flexible visual fiducial system
AprilTag: A robust and flexible visual fiducial system On computing the average orientation of vectors and lines
On computing the average orientation of vectors and lines Structure Tensors for General Purpose LIDAR Feature Extraction
Structure Tensors for General Purpose LIDAR Feature Extraction A General Purpose Feature Extractor for Light Detection and Ranging Data
A General Purpose Feature Extractor for Light Detection and Ranging Data Coordinating a Team of Robots for Urban Reconnaisance
Coordinating a Team of Robots for Urban Reconnaisance A High-rate, Heterogeneous Data Set from the DARPA Urban Challenge
A High-rate, Heterogeneous Data Set from the DARPA Urban Challenge Graph-based Segmentation for Colored 3D Laser Point Clouds
Graph-based Segmentation for Colored 3D Laser Point Clouds Automated Safety Inspection of Grade Crossings
Automated Safety Inspection of Grade Crossings A Passive Solution to the Sensor Synchronization Problem
A Passive Solution to the Sensor Synchronization Problem LCM: Lightweight Communications and Marshalling
LCM: Lightweight Communications and Marshalling Extracting general-purpose features from LIDAR data
Extracting general-purpose features from LIDAR data AprilTag: A robust and flexible multi-purpose fiducial system
AprilTag: A robust and flexible multi-purpose fiducial system Recognizing Places using Spectrally Clustered Local Matches
Recognizing Places using Spectrally Clustered Local Matches Real-Time Correlative Scan Matching
Real-Time Correlative Scan Matching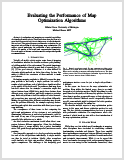 Evaluating the Performance of Map Optimization Algorithms
Evaluating the Performance of Map Optimization Algorithms Simultaneous Local and Global State Estimation for Robotic Navigation
Simultaneous Local and Global State Estimation for Robotic Navigation Finding multiple lanes in urban road networks with vision and lidar
Finding multiple lanes in urban road networks with vision and lidar A Perception-Driven Autonomous Urban Vehicle
A Perception-Driven Autonomous Urban Vehicle A Perception-Driven Autonomous Urban Vehicle
A Perception-Driven Autonomous Urban Vehicle A Perception Driven Autonomous Urban Vehicle
A Perception Driven Autonomous Urban Vehicle Robust and Efficient Robotic Mapping
Robust and Efficient Robotic Mapping Multi-Sensor Lane Finding in Urban Road Networks
Multi-Sensor Lane Finding in Urban Road Networks Implicit Data Association from Spectrally Clustered Local Matches
Implicit Data Association from Spectrally Clustered Local Matches The MIT -- Cornell Collision and Why it Happened
The MIT -- Cornell Collision and Why it Happened Online Constraint Network Optimization for Efficient Maximum Likelihood Map Learning
Online Constraint Network Optimization for Efficient Maximum Likelihood Map Learning Robust Dictionary Attack of Short Simple Substitution Ciphers
Robust Dictionary Attack of Short Simple Substitution Ciphers Spatially-Adaptive Learning Rates for Online Incremental SLAM
Spatially-Adaptive Learning Rates for Online Incremental SLAM Robust Range-Only Beacon Localization
Robust Range-Only Beacon Localization Fast Iterative Alignment of Pose Graphs with Poor Initial Estimates
Fast Iterative Alignment of Pose Graphs with Poor Initial Estimates Recognizing Places with Weak Evidence
Recognizing Places with Weak Evidence Single Cluster Graph Partitioning for Robotics Applications
Single Cluster Graph Partitioning for Robotics Applications Incremental Optimization of Large Robot-Acquired Maps
Incremental Optimization of Large Robot-Acquired Maps Robust Range-Only Beacon Localization
Robust Range-Only Beacon Localization Otto: A Low-Cost Robotics Platform for Research and Education
Otto: A Low-Cost Robotics Platform for Research and Education A Low-Cost, High-Performance Robotics Platform for Education and Research
A Low-Cost, High-Performance Robotics Platform for Education and Research
The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.