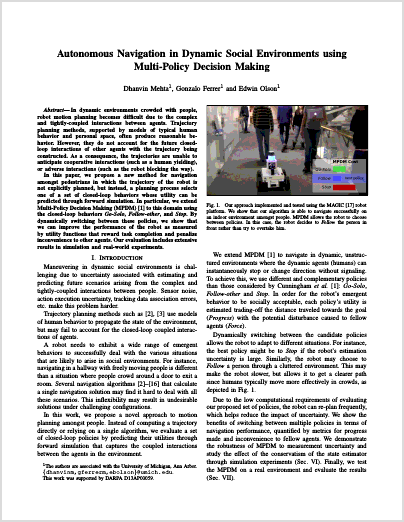
In dynamic environments crowded with people, robot motion planning becomes difficult due to the complex and tightly-coupled interactions between agents. Trajectory planning methods, supported by models of typical human behavior and personal space, often produce reasonable behavior. However, they do not account for the future closed loop interactions of other agents with the trajectory being constructed. As a consequence, the trajectories are unable to anticipate cooperative interactions (such as a human yielding),or adverse interactions (such as the robot blocking the way). In this paper, we propose a new method for navigation amongst pedestrians in which the trajectory of the robot is not explicitly planned, but instead, a planning process selects one of a set of closed-loop behaviors whose utility can be predicted through forward simulation. In particular, we extend Multi-Policy Decision Making (MPDM) to this domain using the closed-loop behaviors Go-Solo, Follow-other, and Stop. By dynamically switching between these policies, we show that we can improve the performance of the robot as measured by utility functions that reward task completion and penalize inconvenience to other agents. Our evaluation includes extensive results in simulation and real-world experiments.
 | Autonomous Navigation in Dynamic Social Environments using Multi-Policy Decision Making Movie 7.8 MB |
@inproceedings{mehta2016iros,
TITLE = {Autonomous Navigation in Dynamic Social Environments using
Multi-Policy Decision Making},
AUTHOR = {Dhanvin Mehta and Gonzalo Ferrer and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE/RSJ} International Conference on Intelligent
Robots and Systems {(IROS)}},
YEAR = {2016},
MONTH = {October},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.