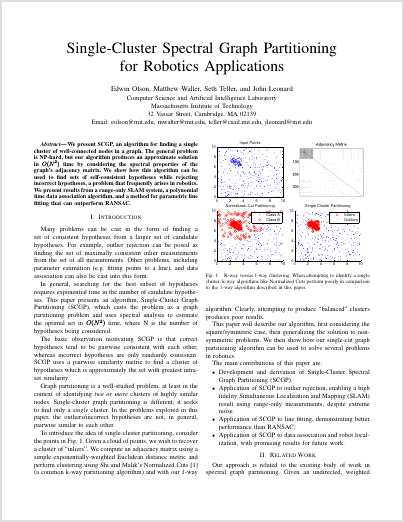
We present SCGP, an algorithm for finding a single cluster of well-connected nodes in a graph. The general problem is NP-hard, but our algorithm produces an approximate solution in O(N^2) time by considering the spectral properties of the graph�s adjacency matrix. We show how this algorithm can be used to find sets of self-consistent hypotheses while rejecting incorrect hypotheses, a problem that frequently arises in robotics. We present results from a range-only SLAM system, a polynomial time data association algorithm, and a method for parametric line fitting that can outperform RANSAC.
@inproceedings{olson2005rss,
AUTHOR = {Edwin Olson and Matthew Walter and John Leonard and Seth Teller},
TITLE = {Single Cluster Graph Partitioning for Robotics Applications},
BOOKTITLE = {Proceedings of Robotics Science and Systems},
PAGES = {265-272},
YEAR = {2005},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.