
Mobile robots are dependent upon a model of the environment for many of their basic functions. Locally accurate maps are critical to collision avoidance, while large-scale maps (accurate both metrically and topologically) are necessary for efficient route planning. Solutions to these problems have immediate and important applications to autonomous vehicles, precision surveying, and domestic robots.
Building accurate maps can be cast as an optimization problem: find the map that is most probable given the set of observations of the environment. However, the problem rapidly becomes difficult when dealing with large maps or large numbers of observations. Sensor noise and non-linearities make the problem even more difficult- especially when using inexpensive (and therefore preferable) sensors.
This thesis describes an optimization algorithm that can rapidly estimate the maximum likelihood map given a set of observations. The algorithm, which iteratively reduces map error by considering a single observation at a time, scales well to large environments with many observations. The approach is particularly robust to noise and non-linearities, quickly escaping local minima that trap current methods. Both batch and online versions of the algorithm are described.
In order to build a map, however, a robot must first be able to recognize places that it has previously seen. Limitations in sensor processing algorithms, coupled with environmental ambiguity, make this difficult. Incorrect place recognitions can rapidly
lead to divergence of the map. This thesis describes a place recognition algorithm that can robustly handle ambiguous data.
We evaluate these algorithms on a number of challenging datasets and provide quantitative comparisons to other state-of-the-art methods, illustrating the advantages of our methods.
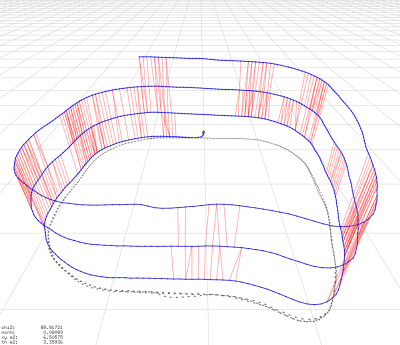 | Area C Loop Closing Image 74.0 KB |
 | CSAIL Indoor Mapping Movie 42.5 MB |
 | CSW with Gauss-Seidel Movie 14.0 MB |
 | CSW with SGD Movie 4.4 MB |
 | Extended Abstract PDF 4.1 MB |
@phdthesis{olson2008phd,
AUTHOR = {Edwin Olson},
TITLE = {Robust and Efficient Robotic Mapping},
MONTH = {June},
YEAR = {2008},
SCHOOL = {Massachusetts Institute of Technology},
ADDRESS = {Cambridge, MA, USA},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.
