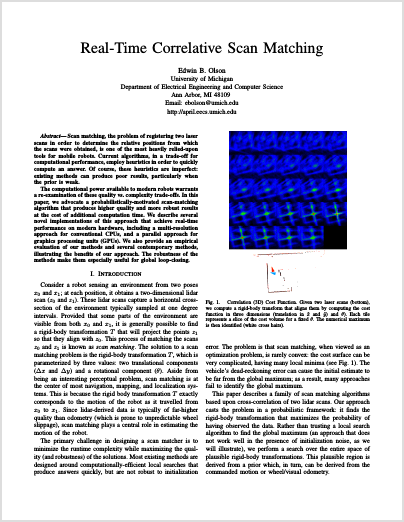
Scan matching, the problem of registering two laser scans in order to determine the relative positions from which the scans were obtained, is one of the most heavily relied-upon tools for mobile robots. The design of current algorithms is strongly influenced by the need for real-time operation: heuristics are employed in order to reduce the complexity of the search. Of course, these heuristics are imperfect, and can result in poor results--- especially in cases where the prior is weak or absent.
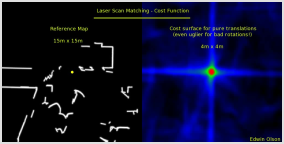
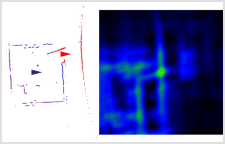 | 3D scan matching cost function Movie 5.1 MB |
 | Incremental scanmatching Movie 27.4 MB |
@inproceedings{olson2009icra,
AUTHOR = {Edwin Olson},
TITLE = {Real-Time Correlative Scan Matching},
BOOKTITLE = {Proceedings of the {IEEE} International Conference on Robotics and
Automation ({ICRA})},
YEAR = {2009},
MONTH = {June},
ADDRESS = {Kobe, Japan},
PAGES = {4387--4393},
PUBLISHER = {IEEE},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.