We present a method for learning efficient feature detectors based on in-situ evaluation as an alternative to hand-engineered feature detection methods. We demonstrate our in-situ learning approach by developing a feature detector optimized for stereo visual odometry.
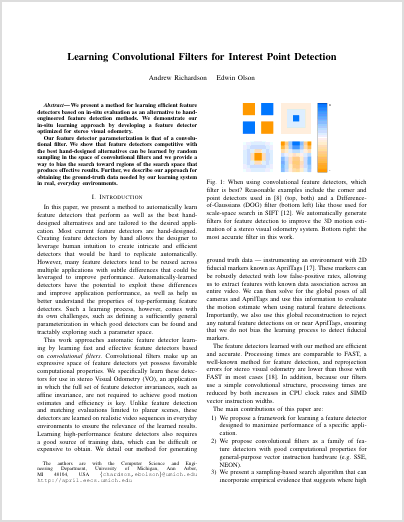
Our feature detector parameterization is that of a convolutional filter. We show that feature detectors competitive with the best hand-designed alternatives can be learned by random sampling in the space of convolutional filters and we provide a way to bias the search toward regions of the search space that produce effective results. Further, we describe our approach for obtaining the ground-truth data needed by our learning system in real, everyday environments.
@inproceedings{richardson2013icra,
TITLE = {Learning Convolutional Filters for Interest Point Detection},
AUTHOR = {Andrew Richardson and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE} International Conference on Robotics and
Automation ({ICRA})},
YEAR = {2013},
MONTH = {May},
KEYWORDS = {interest point detection, feature extraction, detector learning,
visual odometry, computer vision, ground truth},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.