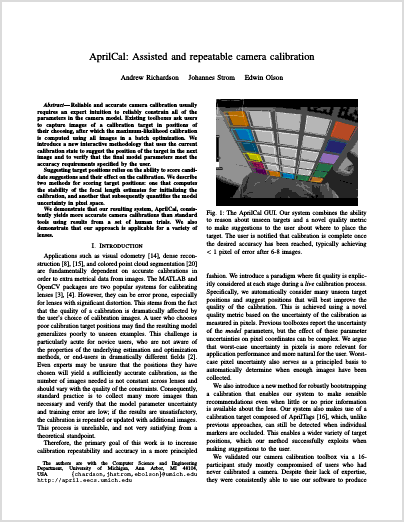
Reliable and accurate camera calibration usually requires an expert intuition to reliably constrain all of the parameters in the camera model. Existing toolboxes ask users to capture images of a calibration target in positions of their choosing, after which the maximum-likelihood calibration is computed using all images in a batch optimization. We introduce a new interactive methodology that uses the current calibration state to suggest the position of the target in the next image and to verify that the final model parameters meet the accuracy requirements specified by the user.
Suggesting target positions relies on the ability to score candidate suggestions and their effect on the calibration. We describe two methods for scoring target positions: one that computes the stability of the focal length estimates for initializing the calibration, and another that subsequently quantifies the model uncertainty in pixel space.
We demonstrate that our resulting system, AprilCal, consistently yields more accurate camera calibrations than standard tools using results from a set of human trials. We also demonstrate that our approach is applicable for a variety of lenses.
 | AprilCal - IROS 2013 (Tokyo) slides PDF 4.3 MB |
 | AprilCal Video - 1080p Movie 83.1 MB |
@inproceedings{richardson2013iros,
TITLE = {{AprilCal}: Assisted and repeatable camera calibration},
AUTHOR = {Andrew Richardson and Johannes Strom and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE/RSJ} International Conference on Intelligent
Robots and Systems {(IROS)}},
YEAR = {2013},
MONTH = {November},
KEYWORDS = {},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.