For online robots, incremental SLAM algorithms offer huge potential computational savings over batch algorithms. The dominant incremental algorithms are iSAM and iSAM2 which offer radically different approaches to computing incremental updates, balancing issues like 1) the need to relinearize, 2) changes in the desirable variable marginalization order, and 3) the underlying conceptual approach (i.e. the "matrix" story versus the "factor graph" story).
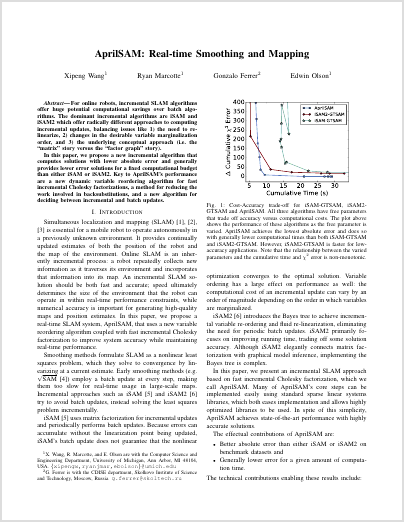
In this paper, we propose a new incremental algorithm that computes solutions with lower absolute error and generally provides lower error solutions for a fixed computational budget than either iSAM or iSAM2. Key to AprilSAM's performance are a new dynamic variable reordering algorithm for fast incremental Cholesky factorizations, a method for reducing the work involved in backsubstitutions, and a new algorithm for deciding between incremental and batch updates.
Also on GitHub
@inproceedings{wang2018aprilsam,
TITLE = {{AprilSAM}: Real-time Smoothing and Mapping},
AUTHOR = {Xipeng Wang and Ryan Marcotte and Gonzalo Ferrer and Edwin Olson},
MONTH = {May},
YEAR = {2018},
BOOKTITLE = {Proceedings of the {IEEE} International Conference on Robotics and
Automation ({ICRA})},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.