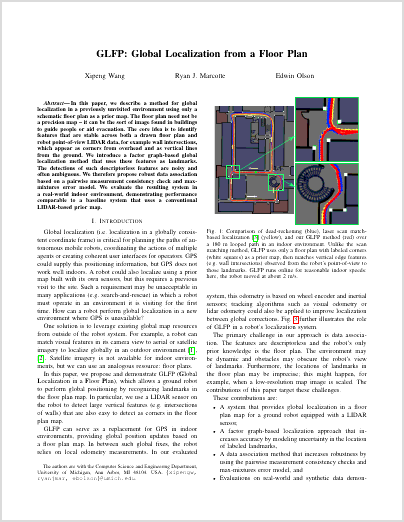
In this paper, we describe a method for global localization in a previously unvisited environment using only a schematic floor plan as a prior map. The floor plan need not be a precision map – it can be the sort of image found in buildings to guide people or aid evacuation. The core idea is to identify features that are stable across both a drawn floor plan and robot point-of-view LIDAR data, for example wall intersections, which appear as corners from overhead and as vertical lines from the ground. We introduce a factor graph-based global localization method that uses these features as landmarks. The detections of such descriptorless features are noisy and often ambiguous. We therefore propose robust data association based on a pairwise measurement consistency check and max- mixtures error model. We evaluate the resulting system in a real-world indoor environment, demonstrating performance comparable to a baseline system that uses a conventional LIDAR-based prior map.
@inproceedings{wang2019iros,
TITLE = {{GLFP}: Global Localization from a Floor Plan},
AUTHOR = {Xipeng Wang and Ryan J. Marcotte and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE/RSJ} International Conference on Intelligent
Robots and Systems {(IROS)}},
YEAR = {2019},
KEYWORDS = {Localization},
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.