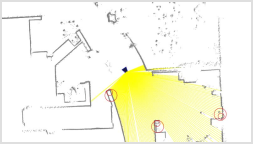
The detection of features from Light Detection and Ranging (LIDAR) data is a fundamental component of feature-based mapping and SLAM systems. Classical approaches are often tied to specific environments, computationally expensive, or do not extract precise features. We describe a general purpose feature detector that is not only efficient, but also applicable to virtually any environment. Our method shares its mathematical foundation with feature detectors from the computer vision community, where structure tensor based methods have been successful. Our resulting method is capable of identifying stable and repeatable features at a variety of spatial scales, and produces uncertainty estimates for use in a state estimation algorithm. We verify the proposed method on standard datasets, including the Victoria Park dataset and the Intel Research Center dataset.
 | Structure tensor based feature extraction for LIDAR data Movie 4.8 MB |
@inproceedings{li2011,
TITLE = {Structure Tensors for General Purpose LIDAR Feature Extraction},
AUTHOR = {Yangming Li and Edwin Olson},
BOOKTITLE = {Proceedings of the {IEEE} International Conference on Robotics and
Automation ({ICRA})},
YEAR = {2011},
MONTH = {May},
VOLUME = {},
NUMBER = {},
PAGES = { },
KEYWORDS = { Robot navigation, SLAM, LIDAR, Feature Extraction, Corner Detector},
ISSN = { },
}

The APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of the Computer Science and Engineering department. It is led by Associate Professor Edwin Olson. Copyright (C) 2010.